About Me
As a curious and passionate robotics researcher, I absolutely love diving into tough
challenges where deep learning meets robotics. I'm constantly on the lookout
for new technologies and driven to see how we can use them to build innovative
solutions. My goal is always to push beyond what's expected and bring fresh ideas to life.
Technical Skills
Python
C++
PyTorch
OpenCV
Docker
Git
ROS1/2
Open3D
Linux
TensorFlow
Unity 3D
JavaScript
React
Node.js
SQL
CI/CD
Numpy
Hugging Face
LLM
Pandas
Sci-kit
Languages
Italian
Native
English
Professional
Spanish
Professional
Catalan
Basic
Work Experience
Robotics & AI Research Engineer
Eurecat | Jul 2021 – Present
Led end-to-end data pipelines for collection, curation, fine-tuning, evaluation and deployment of reinforcement learning, vision and large language models. Designed and deployed advanced autonomy algorithms (full + shared autonomy), from sensor data processing to high-level decision-making. Built and optimized perception modules including localization, object detection, tracking, and planning on embedded hardware across both NVIDIA and non-NVIDIA platforms.
Technology used: C++, Python, Pytorch, ROS1/2, OpenCV, Open3D, Docker, Git, BehaviourTree, HuggingFace, CI/CD
Deep Learning Researcher
University of Trento | Jan 2021 – Jul 2021
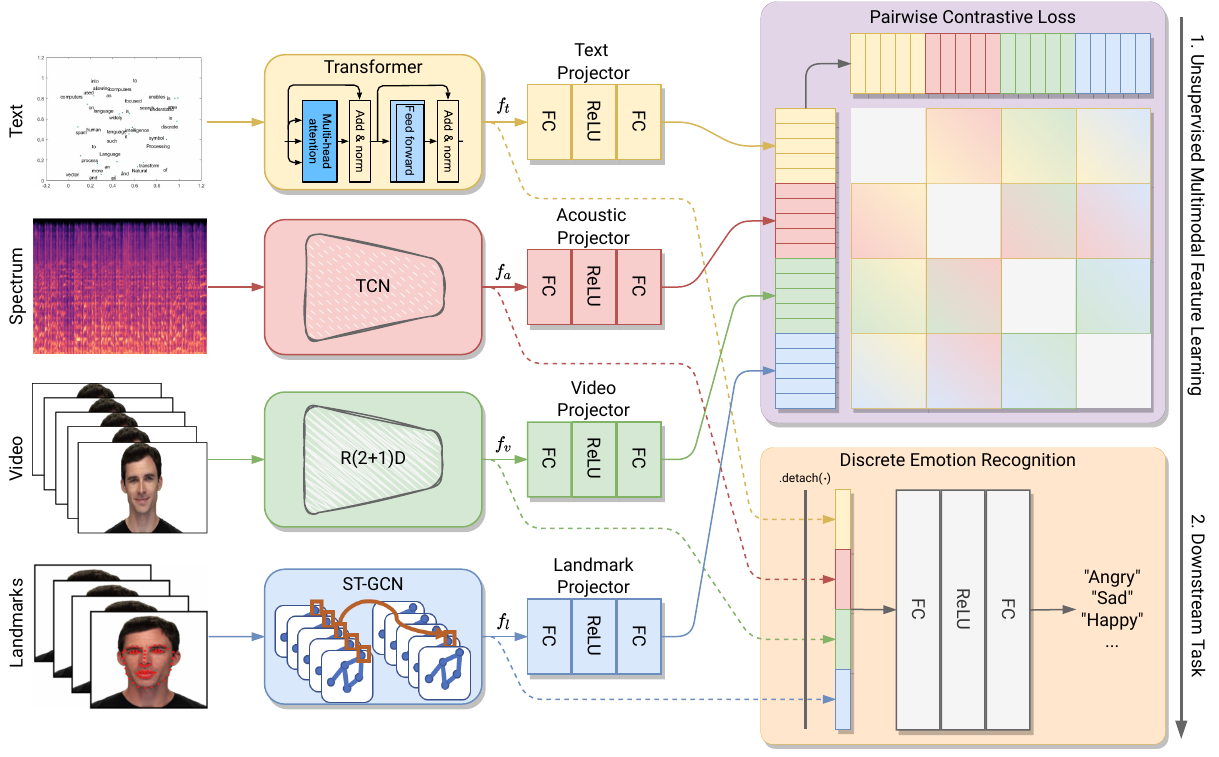
Researched unsupervised multimodal attention methods combining text, audio, and video for emotion recognition in human-robot interaction. Managed the full ML lifecycle: dataset creation, filtering, model architecture design, training, and experiment tracking.
Technology used: Python, Pytorch, Numpy, Sci-kit, Pandas, Docker, Git
Deep Learning Research Engineer
Fondazione Bruno Kessler (FBK) | Oct 2020 – Dec 2020
Developed unsupervised human pose keypoint estimation models using generative adversarial networks for an industrial client. Evaluated performance against state-of-the-art methods and delivered actionable insights.
Technology used: Python, Pytorch, Numpy, Sci-kit, Pandas, Git
Deep Learning Researcher Intern
Bosch | Feb 2020 – Oct 2020
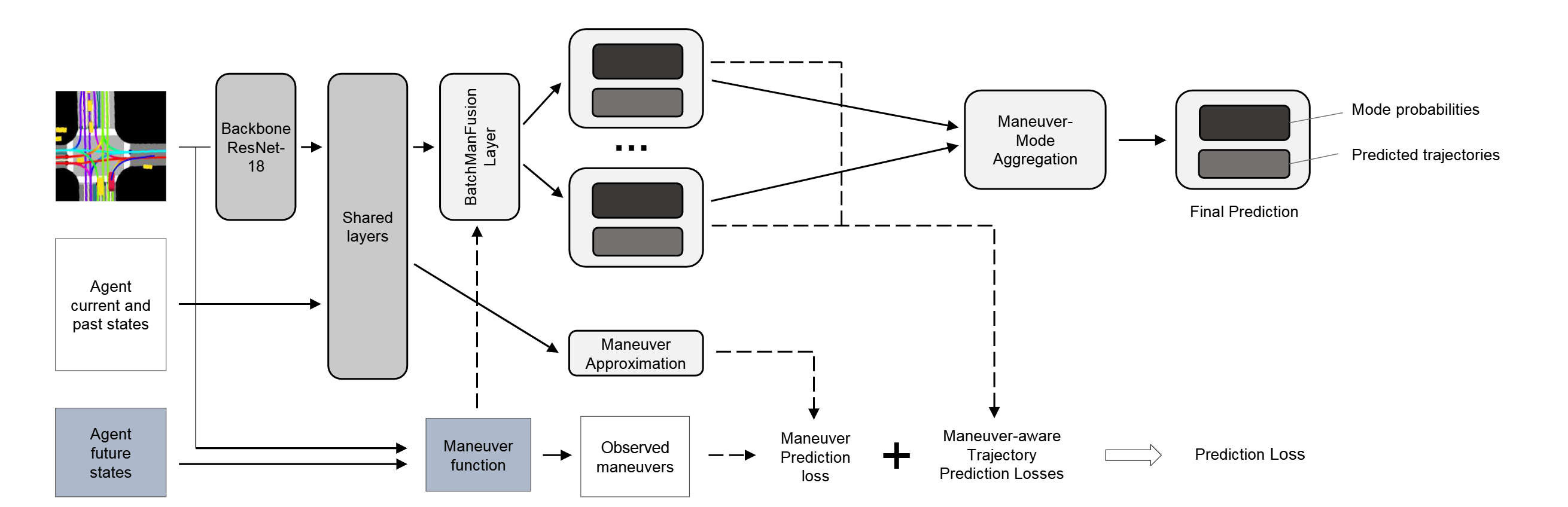
Built deep learning attention-based models for predicting pedestrian and vehicle trajectories in autonomous driving scenarios.
Technology used: Python, Pytorch, Docker, Git
Full Stack Developer Intern
Zucchetti Healthcare | Mar 2018 – Jun 2018
Development front-end and back-end of a Social Media Website in nursing houses for supporting reminisce activities.
Technology used: HTML, CSS, React Js, Node Js, SQLite
Personal Projects
🎮 robo-boy
A web application for controlling ROS 2 robots, tailored for mobile usage. Inspired by retro handheld consoles.
🔗 Project Website
🔗 GitHub Repository
Key Features:
- Multi-Platform Control: Specialized control interfaces for drones, robotic arms, and general robotics applications
- Custom Gamepad Creator: Drag-and-drop interface for creating personalized control layouts with joysticks, buttons, D-pads, toggles, and sliders
- Mobile-First Design: Optimized for touch devices with retro gaming aesthetics
- ROS 2 Integration: Real-time communication with ROS 2 robots through WebSocket connections
- Theme Customization: Multiple themes including custom color palette creation
- 3D Visualization: Point cloud and URDF model visualization capabilities
- Voice Control: Voice command interface for hands-free robot operation
- Containerized Deployment: Docker-based setup with reverse proxy for easy deployment
Technology Stack:
Frontend: React, TypeScript, Vite
ROS Integration: rosbridge_server, web_video_server
3D Graphics: Three.js for robot visualization
Deployment: Docker, Caddy reverse proxy
Styling: CSS3 with custom theme system
Impact & Applications:
This project bridges the gap between complex robotics systems and intuitive user interfaces, making robot control accessible through familiar gaming paradigms. It's particularly valuable for:
- Remote robot teleoperation in research and industrial settings
- Educational robotics with engaging, game-like interfaces
- Rapid prototyping of robot control systems
- Mobile robot operation in field environments
Education
PhD, Robotics & AI
DTU - Technical University of Denmark
2021 - 2024
Industrial Robotic & AI PhD at Danish Technical University conducted at Eurecat (Spain) under the MSCA-ITN programme
Thesis Title: Designing a Human-Drone Interaction: Insights from the AeroAssistant Framework
MSc, Autonomous Systems
University of Trento (Italy) and Aalto University (Finland)
2018 - 2020
European Double Program at University of Trento (Italy) and Aalto University (Finland) under the EIT Digital Master Programme
Major: Robotics & AI | Minor: Business & Entrepreneurship
Thesis Title: Feasible and adaptive attention-based models for multimodal trajectory prediction in urban driving scenarios
BSc, Computer Science
University of Trento, Italy
2015 - 2018
Bachelor degree at University of Trento, Italy, ranked 1st for CS in Italy
Published Research
7 publications at international conferences and workshops
Google Scholar Profile
Point, Segment, and Inspect: Leveraging Promptable Segmentation Models for Semi-Autonomous Aerial Inspection
🔗 Paper
Authors: Riccardo Franceschini, Javier Rodriguez Marquez, Matteo Fumagalli, and Julian Cayero Becerra
International Symposium on Robot and Human Interactive Communication 2024
Riding the Rollercoaster: Improving UAV Piloting Skills with Augmented Visualization and Collaborative Planning
🔗 Paper
Authors: R Franceschini, JR Marquez, M Fumagalli, JC Becerra
2024 International Conference on Unmanned Aircraft Systems
Enhancing Human-Drone Interaction with Human-Meaningful Visual Feedback and Shared-Control Strategies
🔗 Paper
Authors: R Franceschini, M Fumagalli, JC Becerra
2023 International Conference on Unmanned Aircraft Systems
Multimodal emotion recognition with modality-pairwise unsupervised contrastive loss
🔗 Paper
🔗 Code
Authors: R Franceschini, E Fini, C Beyan, A Conti, F Arrigoni, E Ricci
2022 26th International Conference on Pattern Recognition (ICPR)
Learn to efficiently exploit cost maps by combining RRT* with Reinforcement Learning
🔗 Paper
Authors: R Franceschini, M Fumagalli, JC Becerra
2022 IEEE International Symposium on Safety, Security, and Rescue Robotics
Feasible and adaptive multimodal trajectory prediction with semantic maneuver fusion
🔗 Paper
Authors: H Berkemeyer, R Franceschini, T Tran, L Che, G Pipa
2021 IEEE International Conference on Robotics and Automation (ICRA)